Grasp-Anything
 Grasping with Language
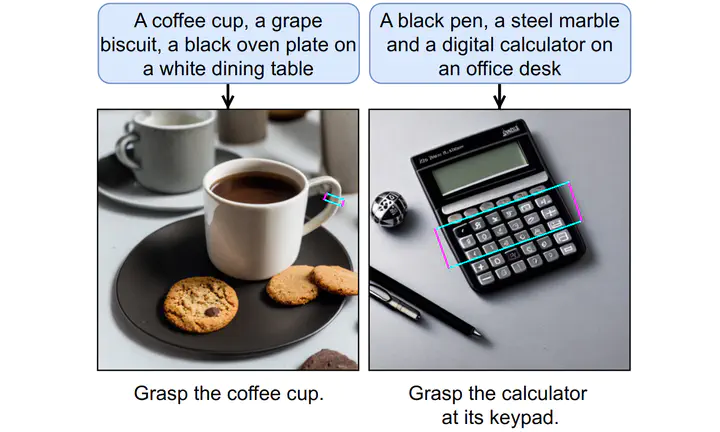
Grasping with LanguageWelcome to Grasp-Anything project! We tackle grasp detection by utilizing foundation models. Our project represents a data centric approach for grasp detection.
Grasp-Anything offers universality, featuring a wide range of everyday objects in natural arrangements, unlike other benchmarks limited by object selection and controlled settings.
Baoru Huang
Assistant Professor
My research interests include Robotics, Computer Vision and Surgical Vision.