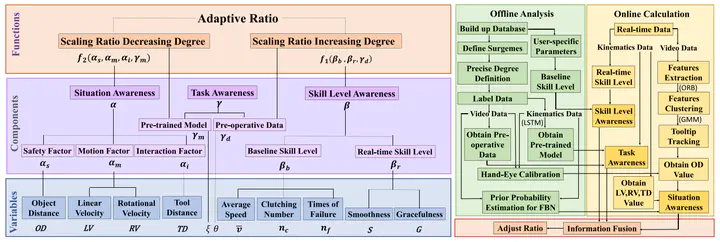
 Overview of the self-adaptive motion scaling framework and the flow charts of the offline analysis and the online calculation.
Overview of the self-adaptive motion scaling framework and the flow charts of the offline analysis and the online calculation.Abstract
Master–slave control is a common form of human–robot interaction for robotic surgery. To ensure seamless and intuitive control, a mechanism of self-adaptive motion scaling during teleoperaton is proposed in this letter. The operator can retain precise control when conducting delicate or complex manipulation, while the movement to a remote target is accelerated via adaptive motion scaling. The proposed framework consists of three components – 1) situation awareness, 2) skill level awareness, and 3) task awareness. The self-adaptive motion scaling ratio allows the operators to perform surgical tasks with high efficiency, forgoing the need of frequent clutching and instrument repositioning. The proposed framework has been verified on a da Vinci Research Kit to assess its usability and robustness. An in-house database is constructed for offline model training and parameter estimation, including both the kinematic data obtained from the robot and visual cues captured through the endoscope. Detailed user studies indicate that a suitable motion-scaling ratio can be obtained and adjusted online. The overall performance of the operators in terms of control efficiency and task completion is significantly improved with the proposed framework.
Supplementary notes can be added here, including code, math, and images.