SplineFormer: An Explainable Transformer-Based Approach for Autonomous Endovascular Navigation
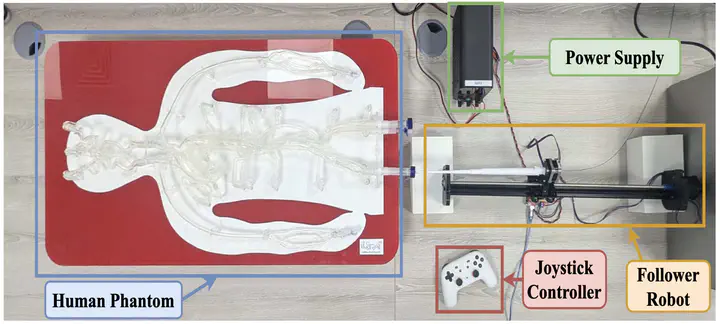 System Overview: The experimental setup includes three main components: i) an anatomically accurate halfbody vascular phantom model from Elastrat Sarl Ltd.; ii) a joystick controller (robotic leader); and iii) a robotic follower. Data is collected through teleoperation, where the robotic follower is controlled by the joystick controller.
System Overview: The experimental setup includes three main components: i) an anatomically accurate halfbody vascular phantom model from Elastrat Sarl Ltd.; ii) a joystick controller (robotic leader); and iii) a robotic follower. Data is collected through teleoperation, where the robotic follower is controlled by the joystick controller.Abstract
Endovascular navigation is a crucial aspect of minimally invasive procedures, where precise control of curvilinear instruments like guidewires is critical for successful interventions. A key challenge in this task is accurately predicting the evolving shape of the guidewire as it navigates through the vasculature, which presents complex deformations due to interactions with the vessel walls. Traditional segmentation methods often fail to provide accurate real-time shape predictions, limiting their effectiveness in highly dynamic environments. To address this, we propose SplineFormer, a new transformer-based architecture, designed specifically to predict the continuous, smooth shape of the guidewire in an explainable way. By leveraging the transformer’s ability, our network effectively captures the intricate bending and twisting of the guidewire, representing it as a spline for greater accuracy and smoothness. We integrate our SplineFormer into an endto-end robot navigation system by leveraging the condensed information. The experimental results demonstrate that our SplineFormer is able to perform endovascular navigation autonomously and achieves a 50% success rate when cannulating the brachiocephalic artery on the real robot.
Supplementary notes can be added here, including code, math, and images.