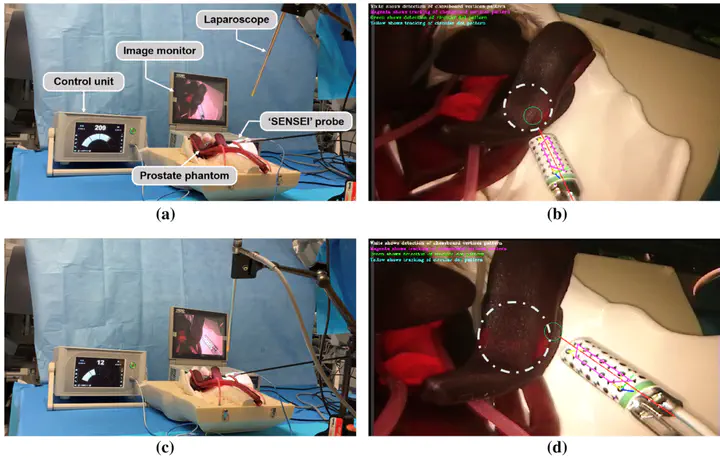
 The hardware setup including laparoscope, image monitor, prostate phantom, ‘SENSEI’ probe, and control unit showing a, b a higher radiation level when the probe was pointing to and placed closer to the radioactive source; and c, d a lower radiation level when the probe was pointing to the edge of the source. The grey dashed circles in b, d show the position of radioactive Cobalt-57 source while the green circles represent the intersection area of the gamma probe axis and the tissue
The hardware setup including laparoscope, image monitor, prostate phantom, ‘SENSEI’ probe, and control unit showing a, b a higher radiation level when the probe was pointing to and placed closer to the radioactive source; and c, d a lower radiation level when the probe was pointing to the edge of the source. The grey dashed circles in b, d show the position of radioactive Cobalt-57 source while the green circles represent the intersection area of the gamma probe axis and the tissueAbstract
Purpose – In surgical oncology, complete cancer resection and lymph node identification are challenging due to the lack of reliable intraoperative visualization. Recently, endoscopic radio-guided cancer resection has been introduced where a novel tethered laparoscopic gamma detector can be used to determine the location of tracer activity, which can complement preoperative nuclear imaging data and endoscopic imaging. However, these probes do not clearly indicate where on the tissue surface the activity originates, making localization of pathological sites difficult and increasing the mental workload of the surgeons. Therefore, a robust real-time gamma probe tracking system integrated with augmented reality is proposed. Methods – A dual-pattern marker has been attached to the gamma probe, which combines chessboard vertices and circular dots for higher detection accuracy. Both patterns are detected simultaneously based on blob detection and the pixel intensity- based vertices detector and used to estimate the pose of the probe. Temporal information is incorporated into the framework to reduce tracking failure. Furthermore, we utilized the 3D point cloud generated from structure from motion to find the intersection between the probe axis and the tissue surface. When presented as an augmented image, this can provide visual feedback to the surgeons.
Supplementary notes can be added here, including code, math, and images.